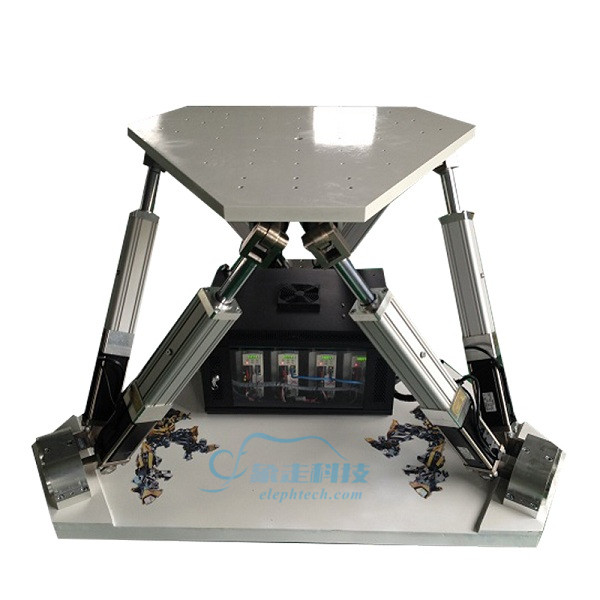
高精度六自由度定位平台
一、用途
该系统核心组成为电动六自由度运动平台,用于空间定位,响应速度快,位置精度高。
二、主要技术参数
|
(1)有效载荷:300kg |
|||||
|
(2)运动参数: |
|||||
|
姿态 |
位移 |
速度 |
加速度 |
定位 精度 |
重复定 位精度 |
|
俯仰(α) |
±15° |
±20°/s |
±120°/s2 |
0.1° |
0.04° |
|
滚转(β) |
±15° |
±20°/s |
±120°/s2 |
0.1° |
0.04° |
|
偏航(γ) |
±15° |
±20°/s |
±120°/s2 |
0.1° |
0.04° |
|
垂直升降(z) |
±140mm |
±500mm/s |
5m/s2 |
0.1mm |
0.03mm |
|
纵向位移(y) |
±150mm |
±500mm/s |
5m/s2 |
0.1mm |
0.03mm |
|
侧向位移(x) |
±150mm |
±500mm/s |
5m/s2 |
0.1mm |
0.03mm |